- Lancer Movitools Motion Studio.
- Créer un nouveau projet « SEW_Positionnement_Tuto »
- Connecter le PC au Movidrive avec le convertisseur USB11A
- Faire clic droit sur « Réseau » puis sélectionner « Raccordements de communication »
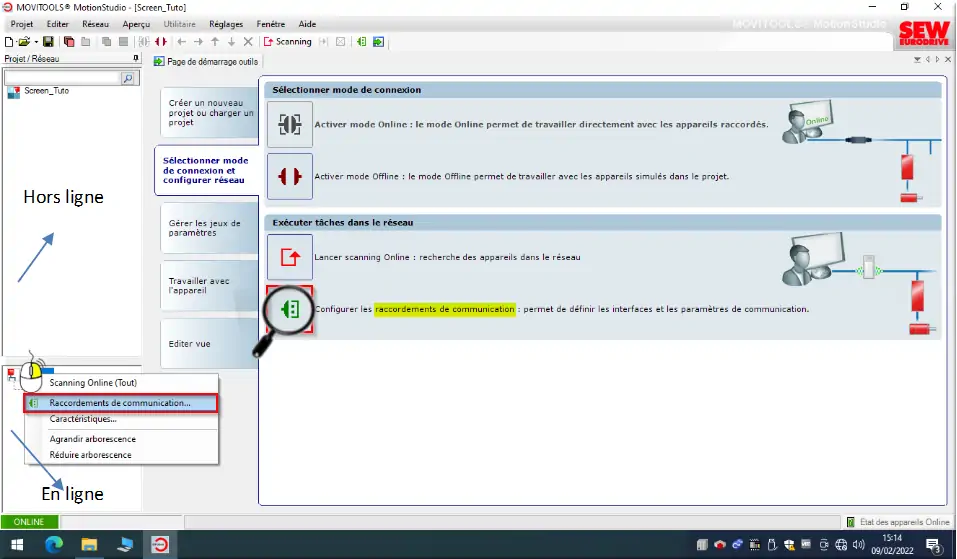
Figure 76 : Raccordements de communication
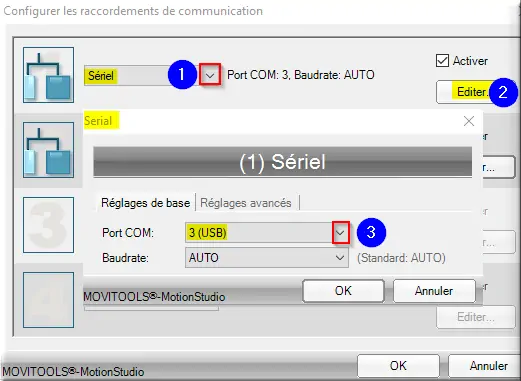
Figure 77 : Configuration port COM série
- Sélectionner « Sériel »,
- dans « Editer »
- sélectionner le port COM avec « USB » entre parenthèses.
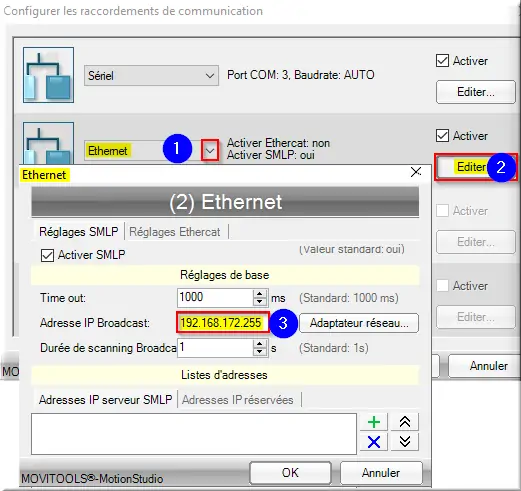
Figure 78 : Configurer Ethernet
- Si on se connecte en « Ethernet »,
- dans « Editer »
- il faudra juste rentrer l’ « Adresse IP Broadcast » dans le même sous-réseau.
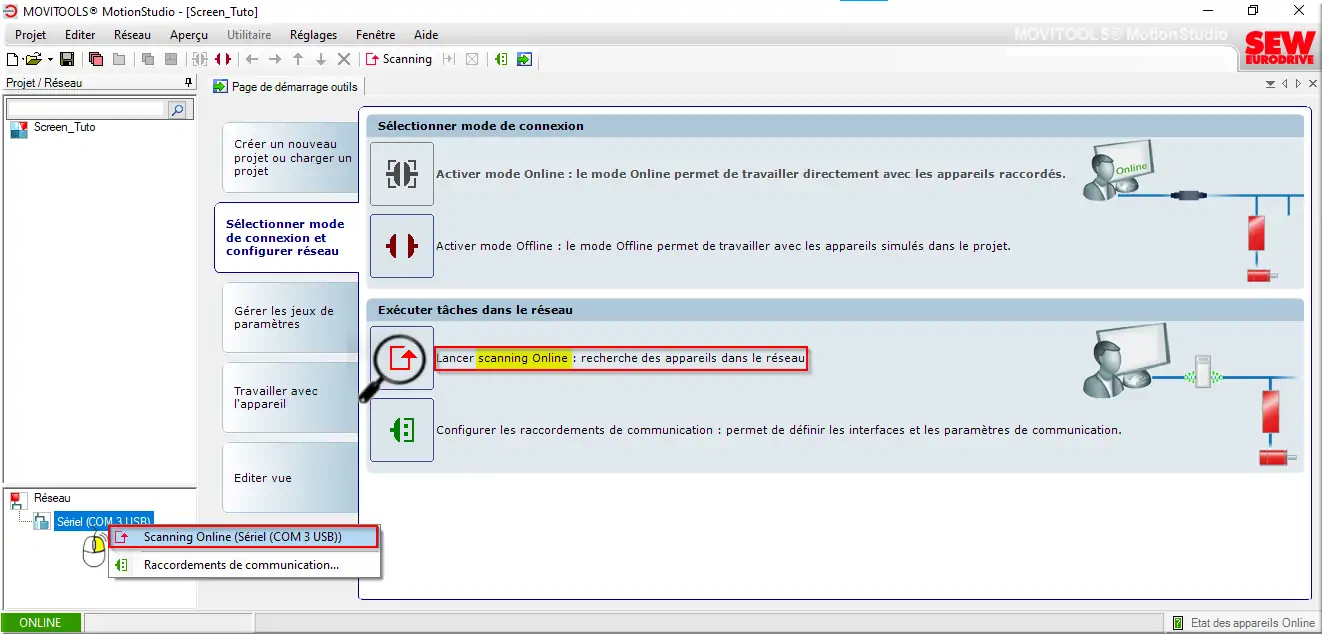
Figure 79 : Scanning Online
Faire un clic droit sur « Sériel » et sélectionner « Scanning Online »
Le Movidrive apparaît :
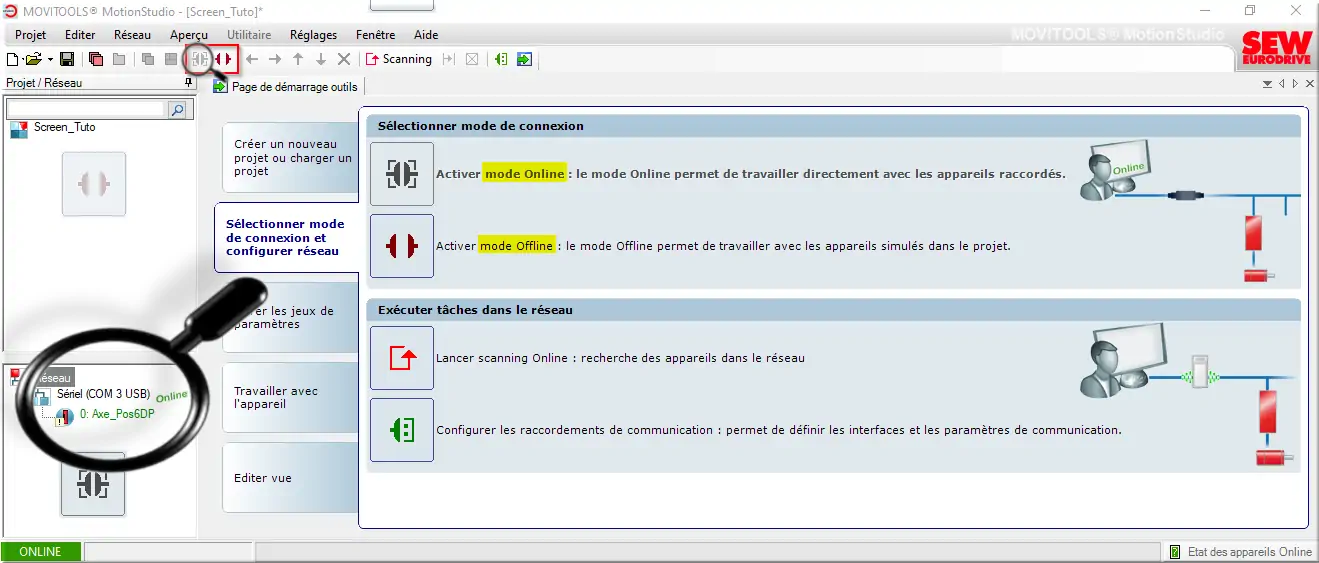
Figure 80 : MoviDrive en vert online
Si on est en mode « Online » :
- Le nom du Movidrive est vert si on est connecté au variateur ;
- Le nom du Movidrive est rouge avec écrit « non accessible » si on n’est pas connecté au variateur.
Pour changer la configuration du variateur, on le remet en état livraison, c’est-à-dire qu’on efface ce qui est paramétré dedans actuellement.
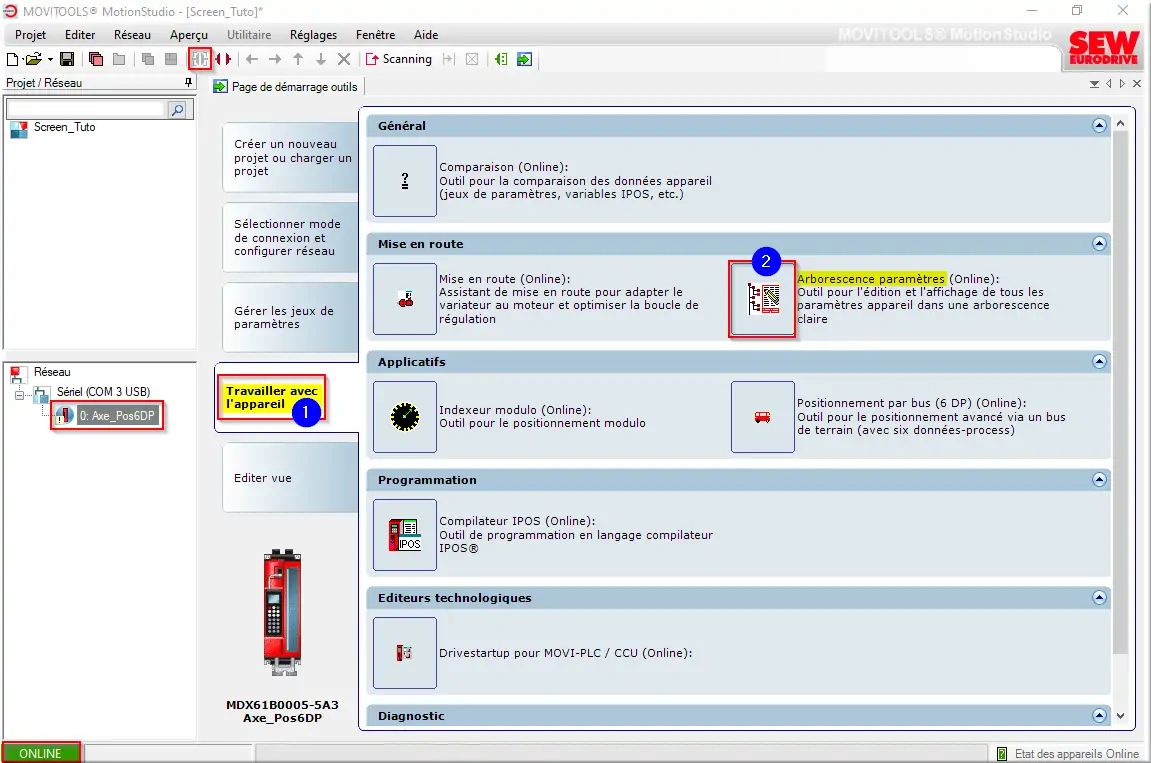
Figure 81 : Arborescence paramètres
- Pour cela, dans l’onglet vertical « Travailler avec appareil »
- sélectionner « Arborescence paramètres »
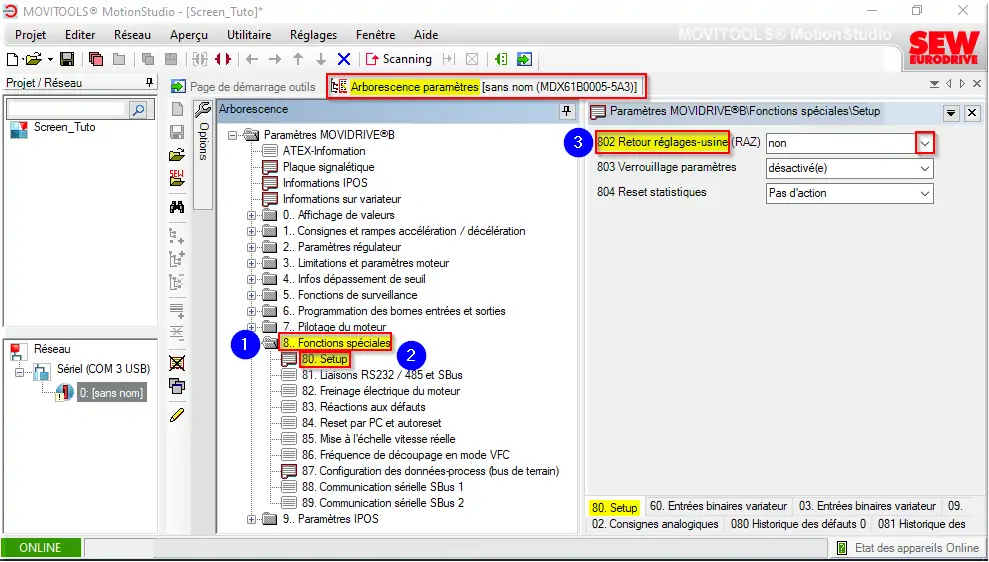
Figure 82 : 802 Retour réglage-usine
- Dans « 8.. Fonctions spéciales »
- ouvrir le menu « 80. Setup »
- pour le paramètre « 802 Retour réglage-usine », sélectionner « Etat livraison » (le paramètre revient sur « Non » tout seul).
Refaire un scan pour voir apparaître la modification et « 0 : [sans nom] » dans le nom du Movidrive.
Fermer l’Arborescence paramètres.
Cliquer sur « Mise en route »
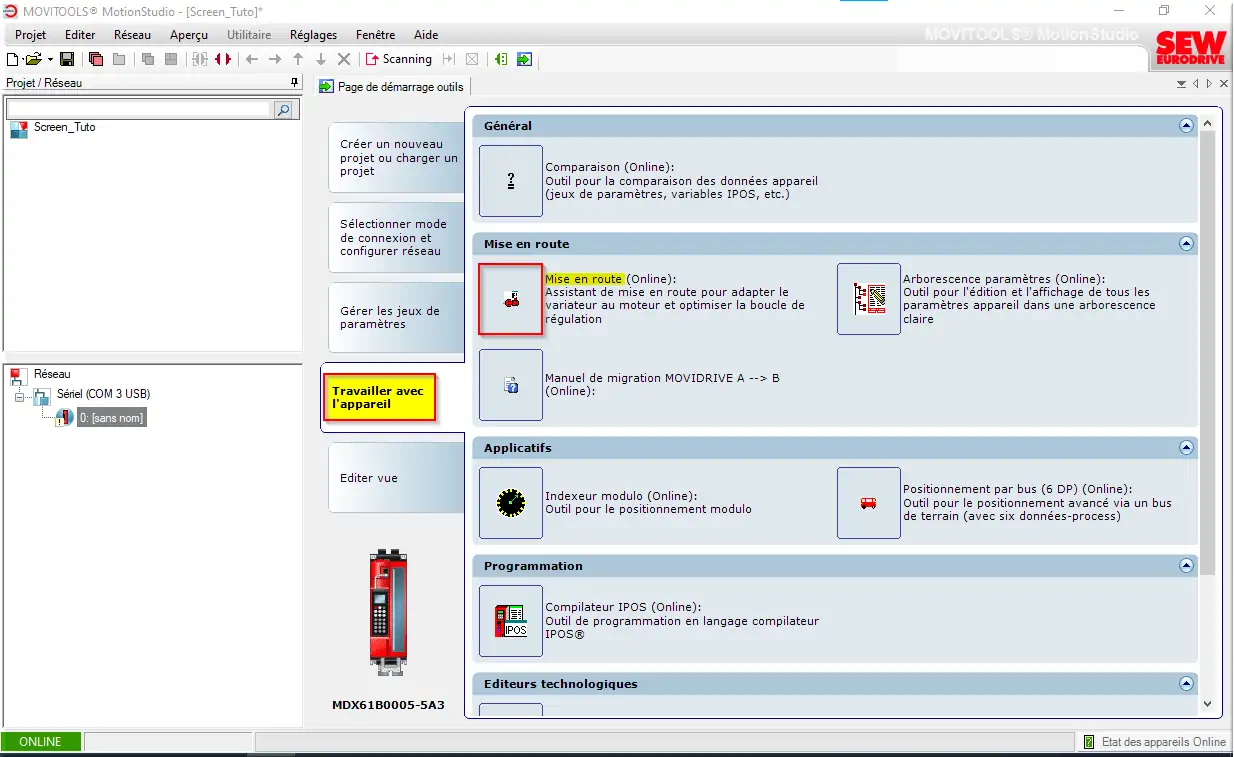
Figure 83 : Mise en route
Cliquer sur « Procéder à la mise en service »
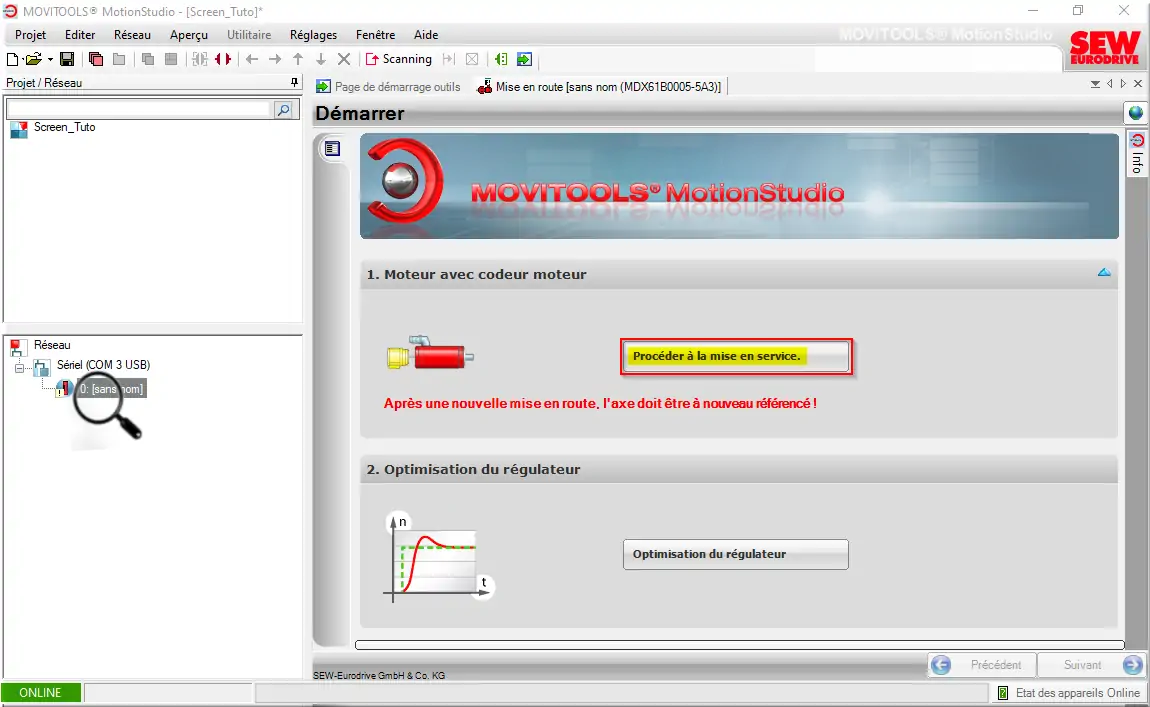
Figure 84 : Procéder à la mise en service
Pour la configuration qui suit, voici la plaque signalétique du moteur utilisé.
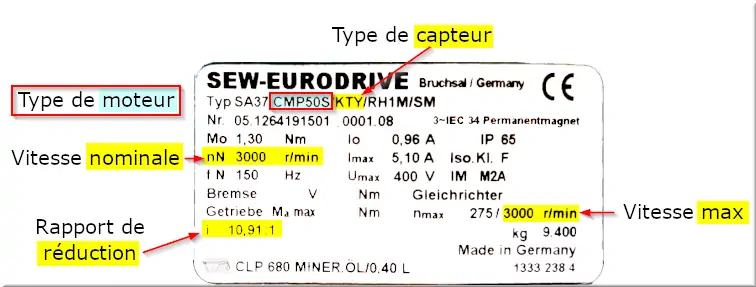
Figure 85 : plaque signalétique du moteur
Pour le rapport de réduction, s’il est infini consulter la doc du moteur ou contacter SEW pour avoir la vraie valeur de ce rapport.
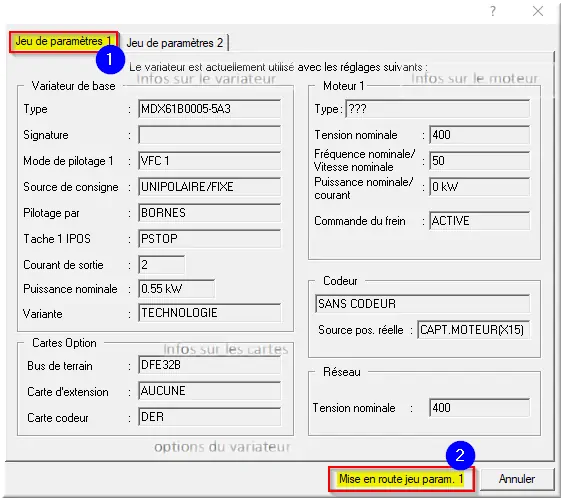
Figure 86 : Mise en route param. 1
- On utilisera uniquement l’onglet « Jeu de paramètres 1 » ;
- cliquer sur « mise en route jeu de param. 1 » .
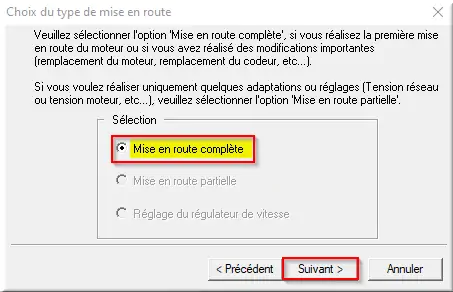
Figure 87 : Mise en route complète
Sélectionner l’option ◉ « Mise en route complète » et cliquer sur Suivant.
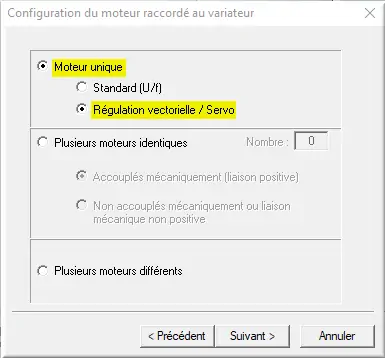
Figure 88 : option Moteur unique
Choisir le nombre de moteurs utilisés : ici ◉ « Moteur unique » et ◉ « Régulation vectorielle / Servo » et cliquer sur Suivant.
Figure 89 : BP Suivant
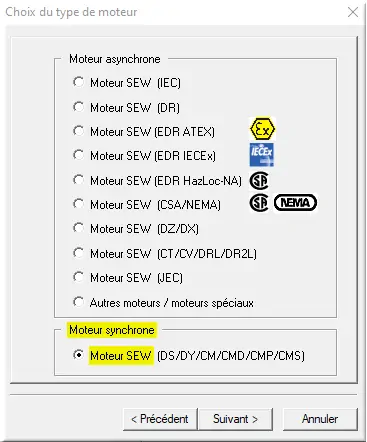
Figure 90 : Moteur synchrone SEW
Choisir le type de moteur : ici « Moteur synchrone » et cliquer sur Suivant.
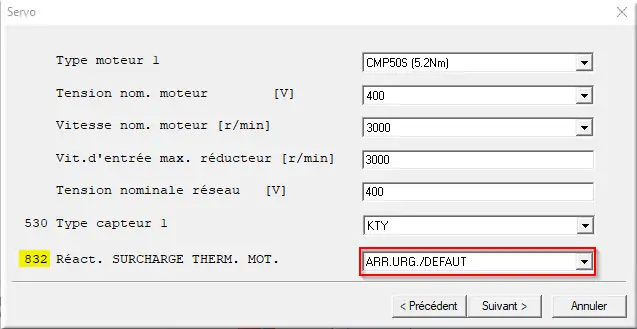
Figure 91 : Arrêt urgent défaut
Remplir les paramètres en fonction de la plaque signalétique du moteur (Laisser le 832 sur ARR.URG./DEFAUT) et cliquer sur Suivant.
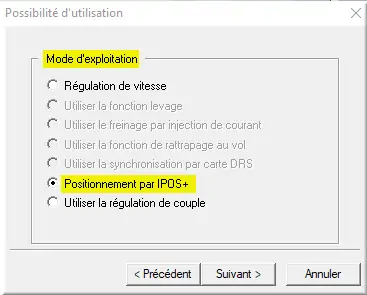
Figure 92 : Positionnement par IPOS plus
Choisir « Positionnement par IPOS+ » et cliquer sur Suivant.
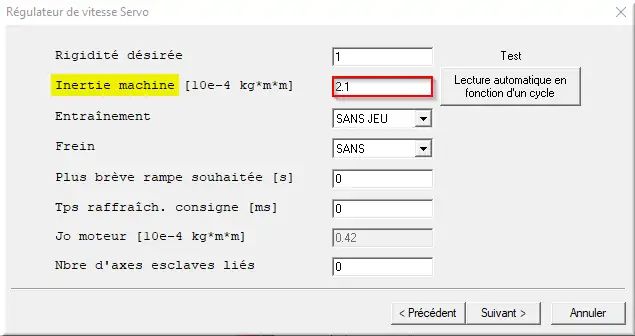
Figure 93 : Inertie machine
Dans « Inertie machine », par défaut, mettre comme valeur :
- 5*Jo moteur pour de la translation ;
- 3*Jo moteur pour du levage.
Cette valeur sera ajustée en fonctionnement.
Figure 94 : Transfert de la proposition 303
Pour les pages suivantes, cliquer sur « Transfert de la proposition » puis sur Suivant.
Figure 95 : Transfert de la proposition 200
Figure 96 : Transfert de la proposition 100
Ne pas tenir compte des paramètres 100 et 101 qui seront modifiés avec l’applicatif utilisé.
Figure 97 : BP Transfert. Terminer.
Pour transférer les réglages :
- cliquer sur « Transfert » ;
- puis « Terminer ».
Ajustement de la valeur de l’inertie machine :
- dans l’onglet vertical « Travailler avec appareil », cliquer sur « Mise en route »
- Sélectionner « Optimisation du régulateur »
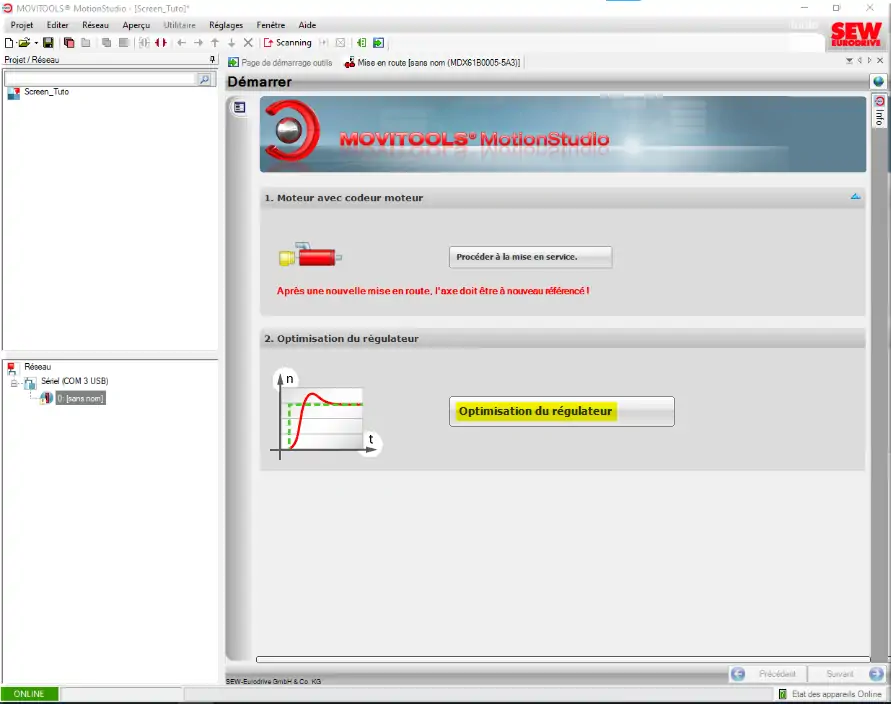
Figure 98 : Optimisation du régulateur
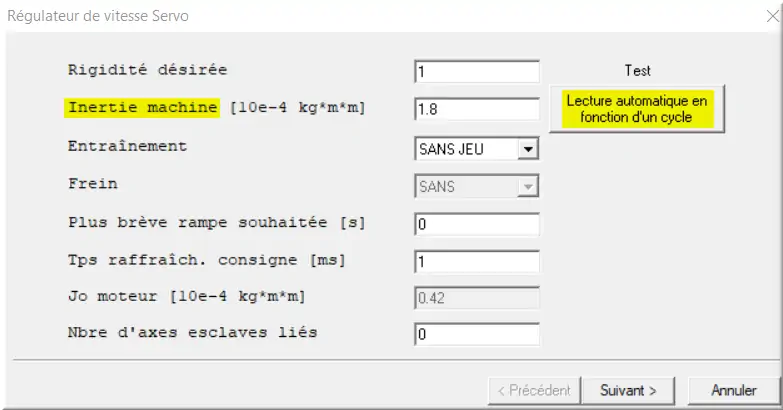
Figure 99 : BP Lecture automatique
Cliquer sur le BP « Lecture automatique en fonction d’un cycle ».
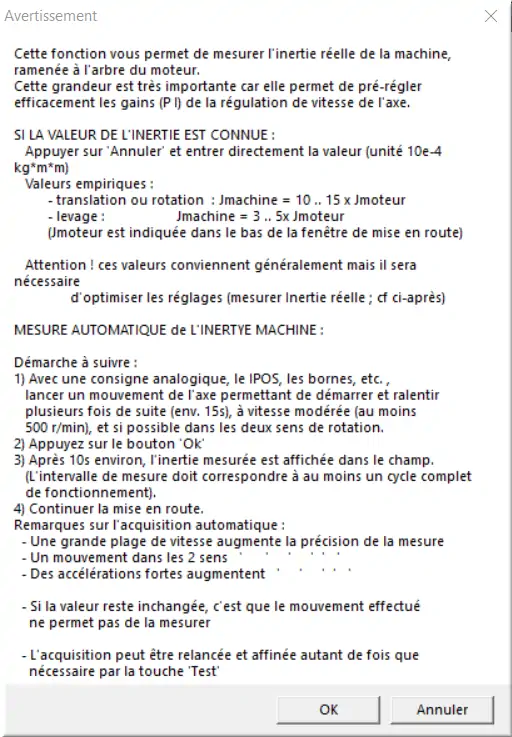
Figure 100 : Aide sur l’inertie machine
Lire l’aide puis valider par « OK ».
La valeur de l’inertie machine va se modifier automatiquement.
Cliquer sur « Suivant »
Transférer la proposition et cliquer sur « Suivant ».
Pour finir, transférer les réglages et cliquer sur « Terminer ».